Next: Track Competition for Clone Up: CATS Track Recognition Strategy Previous: Reconstruction of Space-Points Contents
In this step CATS creates track candidates out of space-points and collects hits missed in layers where space-points could not be reconstructed due to dead regions or detector inefficiencies.
The first task is fulfilled by a cellular automaton, which uses space-points as input elementary
units or cells. A cellular automaton is a discrete-time dynamical system that
evolves in a phase space consisting of cells. Lets denote the space-points as ![]() ,
where
,
where ![]() is the number of superlayer,
is the number of superlayer,
![]() ,
, ![]() is the number of a space-point
inside
is the number of a space-point
inside ![]() -th superlayer and each space-point is defined by a set of its parameters:
-th superlayer and each space-point is defined by a set of its parameters:
![]() . At any moment
. At any moment ![]() of discrete time, each cell (or space-point)
can take several states
of discrete time, each cell (or space-point)
can take several states
![]() . The automaton's evolution, i.e.
evolution of the cell states, is determined by a set of rules (for instance, a
table) according to which the new state of a cell is calculated on the basis of
the states of its neighbors in the next and previous superlayers. The final
value of a state
. The automaton's evolution, i.e.
evolution of the cell states, is determined by a set of rules (for instance, a
table) according to which the new state of a cell is calculated on the basis of
the states of its neighbors in the next and previous superlayers. The final
value of a state
![]() is equal to a position of the space-point
is equal to a position of the space-point ![]() on
a reconstructed track candidate. All initial states
on
a reconstructed track candidate. All initial states ![]() are assumed to be
equal unity.
are assumed to be
equal unity.
After initialization the cellular automaton performs the following loop
over superlayers
![]() , starting with the second superlayer,
, starting with the second superlayer, ![]() :
:
![\begin{displaymath}
\widetilde{p}^k_{Lj}=p^k_{Lj}+
\left\{
\begin{array}{l}
1, \...
...t]
0, \mbox{ if } p^k_{L-1,l}\ne p^k_{Lj}
\end{array}\right. .
\end{displaymath}](img148.png)
If, during an iteration, all states keep their values, the automaton stops the iteration and proceeds with the collection of track candidates:
When all branches starting with states
![]() are completed, the
algorithm proceeds with the remaining space-points with lower states
are completed, the
algorithm proceeds with the remaining space-points with lower states
![]() ,
and so on.
,
and so on.
All collected track candidates are refitted by the Kalman parameter estimator,
candidates with a bad ![]() are discarded.
are discarded.
Further details on the application of cellular automata for track searching can be found in [#!CATS-NIM!#].
 |
The clear advantage of a cellular automaton is its intrinsic simplicity which makes tracking based on it extremely fast. Unfortunately, the search for tracks performed by a cellular automaton is not exhaustive, for example, if, in an intermediate superlayer, there is no neighboring space-point, the cellular automaton cannot jump over such a hole. This problem is typical in case of dead regions in the OTR.
Due to this reason, in CATS, the tracking based on a cellular automaton is accompanied by a simple (and fast) track following procedure. As seeds, this procedure uses track candidates found by the cellular automaton and space-points for which the automaton could not find any neighbors.
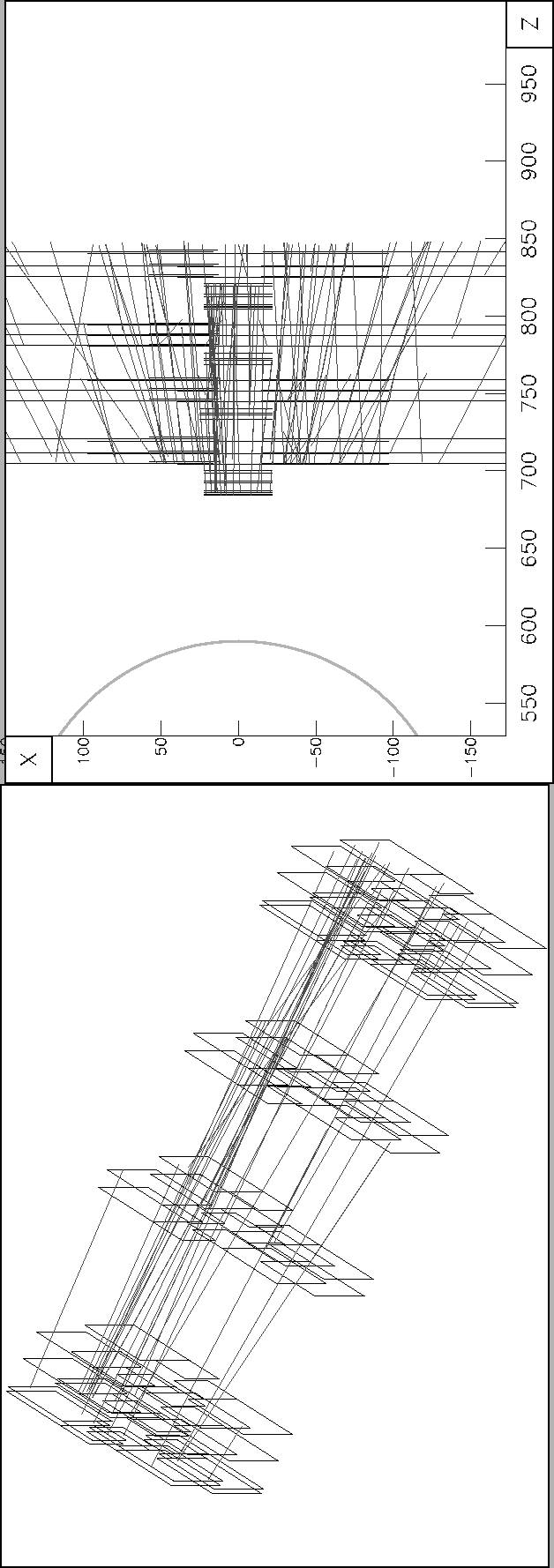
A special track following procedure is also used for propagation of track candidates reconstructed in the ITR into the Outer Tracker. Since the hit resolution of the ITR is much better than for the OTR, it is possible to resolve L/R ambiguity ``on the fly'', i.e., in the course of the track following. Therefore this particular procedure works with the OTR hits rather than clusters of hits. An example of the picture obtained at this step of the CATS reconstruction chain is shown in Fig. 4.5.
Yury Gorbunov 2010-10-21